 .pdf
.pdf
Turek-Hron FSI Benchmark
In order to validate our fluid-structure interaction solver, a benchmark, initially proposed by [TurekHron], is realized.
Computer codes, used for the acquisition of results, are from [Chabannes].
| This benchmark is linked to the Turek-Hron CFD and Turek-Hron CSM benchmarks. |
1. Problem Description
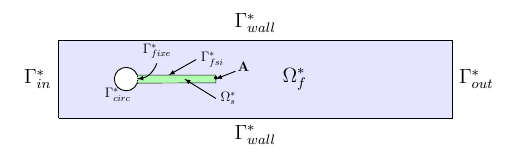
In this case, we want to study the flow of a laminar incrompressible flow around an elastic obstacle, fixed to a rigid cylinder. The geometry is given with Figure Geometry of the Turek & Hron FSI Benchmark.. We denote \(\Omega_f^*\) the fluid domain, represented by a rectangle of dimension \( [0,2.5] \times [0,0.41] \). This domain is characterized by its density \(\rho_f\) and its dynamic viscosity \(\mu_f\). In this case, the fluid material we used is glycerin.
The model chosen to describe the flow is the incompressible Navier-Stockes model. On the other side, the structure domain, named \(\Omega_s^*\), is described by a hyperelastic equation with Saint-Venant-Kirchhoff law.
2. Inputs
The following table displays the various fixed and variables parameters of this test-case.
| Name | Description | Nominal Value | Units |
|---|---|---|---|
\(l\) |
elastic structure length |
\(0.35\) |
\(m\) |
\(h\) |
elastic structure height |
\(0.02\) |
\(m\) |
\(r\) |
cylinder radius |
\(0.05\) |
\(m\) |
\(C\) |
cylinder center coordinates |
\((0.2,0.2)\) |
\(m\) |
\(A\) |
control point coordinates |
\((0.2,0.2)\) |
\(m\) |
\(B\) |
point coordinates |
\((0.15,0.2)\) |
\(m\) |
\(E_s\) |
Young’s modulus |
\(5.6 \times 10^6\) |
\(kg.m^{-1}s^{-2}\) |
\(\nu_s\) |
Poisson’s ratio |
\(0.4\) |
dimensionless |
\(\rho_s\) |
structure density |
\(1000\) |
\(kg.m^{-3}\) |
\(\nu_f\) |
kinematic viscosity |
\(1\times 10^{-3}\) |
\(m^2.s^{-1}\) |
\(\mu_f\) |
dynamic viscosity |
\(1\) |
\(kg.m^{-1}.s^{-1}\) |
\(\rho_f\) |
density |
\(1000\) |
\(kg.m^{-3}\) |
\(f_f\) |
source term |
0 |
|
\(\bar{U}\) |
mean inflow velocity |
2 |
\(m.s^{-1}\) |
2.1. Boundary conditions
We set
-
on \(\Gamma_{in}^*\), an inflow Dirichlet condition : \( \boldsymbol{u}_f=(v_{in},0);\)
-
on \(\Gamma_{wall}^* \cup \Gamma_{circ}^*\), a homogeneous Dirichlet condition : \(\boldsymbol{u}_f=\boldsymbol{0};\)
-
on \(\Gamma_{out}^*\), a Neumann condition : \(\boldsymbol{\sigma}_f\boldsymbol{n}_f=\boldsymbol{0};\)
-
on \(\Gamma_{fixe}^*\), a condition that imposes this boundary to be fixed : \(\boldsymbol{\eta}_s=0;\)
-
on \(\Gamma_{fsi}^*\) :
where \(\boldsymbol{n}_f\) is the outer unit normal vector from \(\partial \Omega_f^*\).
In order to describe the flow inlet by \(\Gamma_{in}\), a parabolic velocity profile is used. It can be expressed by
where \(\bar{U}\) is the mean inflow velocity.
However, to impose a progressive increase of this velocity profile, we define
With t the time.
3. Outputs
The quantities we observe during this benchmark are on one hand the lift and drag forces ( respectively \(F_L\) and \(F_D\) ), as well as the displacement, on \(x\) and \(y\) axis, of the point A is the second value that interest us here.
4. Discretization
To realize these tests, we made the choice to used \(P_N~-~P_{N-1}\) Taylor-Hood finite elements to discretize the fluid space. For the time discretization, we use :
-
a BDF at order 2 is used for the fluid
-
a Newmark scheme for the structure, with parameters \(\gamma=0.5\) and \(\beta=0.25\).
Theses choices are described for example in [Chabannes].
5. Results
First at all, we will discretize the simulation parameters for the different cases studied.
\(N_{elt}\) |
\(N_{dof}\) |
\( [P^N_c(\Omega_{f,\delta}]^2 \times P^{N-1}_c(\Omega_{f,\delta}) \times V^{N-1}_{s,\delta}\) |
\(\Delta t\) |
|
15872 |
304128 |
0.00025 |
||
(1) |
1284 |
27400 |
\( [P^4_c(\Omega_{f,(h,3)}]^2 \times P^3_c(\Omega_{f,(h,3)}) \times V^3_{s,(h,3)}\) |
0.005 |
(2) |
2117 |
44834 |
\( [P^4_c(\Omega_{f,(h,3)}]^2 \times P^3_c(\Omega_{f,(h,3)}) \times V^3_{s,(h,3)}\) |
0.005 |
(3) |
4549 |
95427 |
\( [P^4_c(\Omega_{f,(h,3)}]^2 \times P^3_c(\Omega_{f,(h,3)}) \times V^3_{s,(h,3)}\) |
0.005 |
(4) |
17702 |
81654 |
\( [P^2_c(\Omega_{f,(h,1)}]^2 \times P^1_c(\Omega_{f,(h,1)}) \times V^1_{s,(h,1)}\) |
0.0005 |
Then the FSI3 benchmark results are detailed below.
\(x\) displacement \( [\times 10^{-3}] \) |
\(y\) displacement \( [\times 10^{-3}] \) |
Drag |
Lift |
|
-2.69 ± 2.53 [10.9] |
1.48 ± 34.38 [5.3] |
457.3 ± 22.66 [10.9] |
2.22 ± 149.78 [5.3] |
|
464.5 ± 40.50 |
6.00 ± 166.00 [5.5] |
|||
-2.88 ± 2.72 [10.9] |
1.47 ± 34.99 [5.5] |
460.5 ± 27.74 [10.9] |
2.50 ± 153.91 [5.5] |
|
-4.54 ± 4.34 [10.1] |
1.50 ± 42.50 [5.1] |
467.5 ± 39.50 [10.1] |
16.2 ± 188.70 [5.1] |
|
474.9 ± 28.10 |
3.90 ± 165.90 [5.5] |
|||
-2.83 ± 2.78 [10.8] |
1.35 ± 34.75 [5.4] |
458.5 ± 24.00 [10.8] |
2.50 ± 147.50 [5.4] |
|
(1) |
-2.86 ± 2.74 [10.9] |
1.31 ± 34.71 [5.4] |
459.7 ± 29.97 [10.9] |
4.46 ± 172.53 [5.4] |
(2) |
-2.85 ± 2.72 [10.9] |
1.35 ± 34.62 [5.4] |
459.2 ± 29.62 [10.9] |
3.53 ± 172.73 [5.4] |
(3) |
-2.88 ± 2.75 [10.9] |
1.35 ± 34.72 [5.4] |
459.3 ± 29.84 [10.9] |
3.19 ± 171.20 [5.4] |
(4) |
-2.90 ± 2.77 [11.0] |
1.33 ± 34.90 [5.5] |
457.9 ± 31.79 [11.0] |
8.93 ± 216.21 [5.5] |
5.1. Conclusion
Our first three results are quite similar to given references values. That show us that high order approximation order for space and time give us accurate values, while allow us to use less degree of freedom.
However, the lift force seems to undergo some disturbances, compared to reference results, and it’s more noticeable in our fourth case. This phenomenon is describe by [Beuer], where they’re explaining these disturbances are caused by Aitken dynamic relaxation, used in fluid structure relation for the fixed point algorithm.
In order to correct them, they propose to lower the fixed point tolerance, but this method also lowers calculation performances. An other method to solve this deviation is to use a fixed relaxation parameter \(\theta\). In this case, the optimal \(\theta\) seems to be equal to \(0.5\).
6. Bibliography
-
[TurekHron] S. Turek and J. Hron, Proposal for numerical benchmarking of fluid-structure interaction between an elastic object and laminar incompressible flow, Lecture Notes in Computational Science and Engineering, 2006.
-
[Chabannes] Vincent Chabannes, Vers la simulation numérique des écoulements sanguins, Équations aux dérivées partielles [math.AP], Université de Grenoble, 2013.
-
[Breuer] M. Breuer, G. De Nayer, M. Münsch, T. Gallinger, and R. Wüchner, Fluid–structure interaction using a partitioned semi-implicit predictor–corrector coupling scheme for the application of clarge-eddy simulation, Journal of Fluids and Structures, 2012.
-
[TurekHron2] S. Turek, J. Hron, M. Madlik, M. Razzaq, H. Wobker, and JF Acker, Numerical simulation and benchmarking of a monolithic multigrid solver for fluid-structure interaction problems with application to hemodynamics, Fluid Structure Interaction II, pages 193–220, 2010.
-
[MunschBreuer] M. Münsch and M. Breuer, Numerical simulation of fluid–structure interaction using eddy–resolving schemes, Fluid Structure Interaction II, pages 221–253, 2010.
-
[Gallinger] T.G. Gallinger, Effiziente Algorithmen zur partitionierten Lösung stark gekoppelter Probleme der Fluid-Struktur-Wechselwirkung, Shaker, 2010.
-
[Sandboge] R. Sandboge, Fluid-structure interaction with openfsitm and md nastrantm structural solver, Ann Arbor, 1001 :48105, 2010.